¶ 基于 DAPLink 的 GDB 调试
¶ 概述
Zephyr 提供了多种 debug 调试方式,支持 gdb 调试,本章节主要介绍如何基于 VSCode 和 CSK6-NanoKit 开发板板载DAPLink调试器实现应用项目的调试。通过本章节学习,开发者可以了解到:
- PC端如何对应用项目进行调试
- 基于 VS Code 和 DAPLink 的调试方法
TIP
本章节功能特性仅在 lisa zep 工具 1.6.2 及以上版本支持,您可通过执行lisa info zephyr检查本地的工具版本,并可通过lisa update zephyr更新到最新工具版本。
¶ 准备工作
- CSK6-NanoKit 开发板,DAPLink 调试 USB 口接 PC 端。
- PC 端安装 Visual Studio Code,根据系统类型选择对应的 Windows 或 Linux 版本。
csk6011a_nano的日志串口接 NanoKit 板子的DAPLink的USB TYPE C口即可在电脑端上使用串口调试助手查看日志。如果不是使用 NanoKit 的话,可以通过A03 TX A02 RX接串口板连接电脑来查看日志,波特率为 115200。
¶ 调试过程
¶ VSCode 调试环境搭建
以下方式中以
csk6011a_nano为例
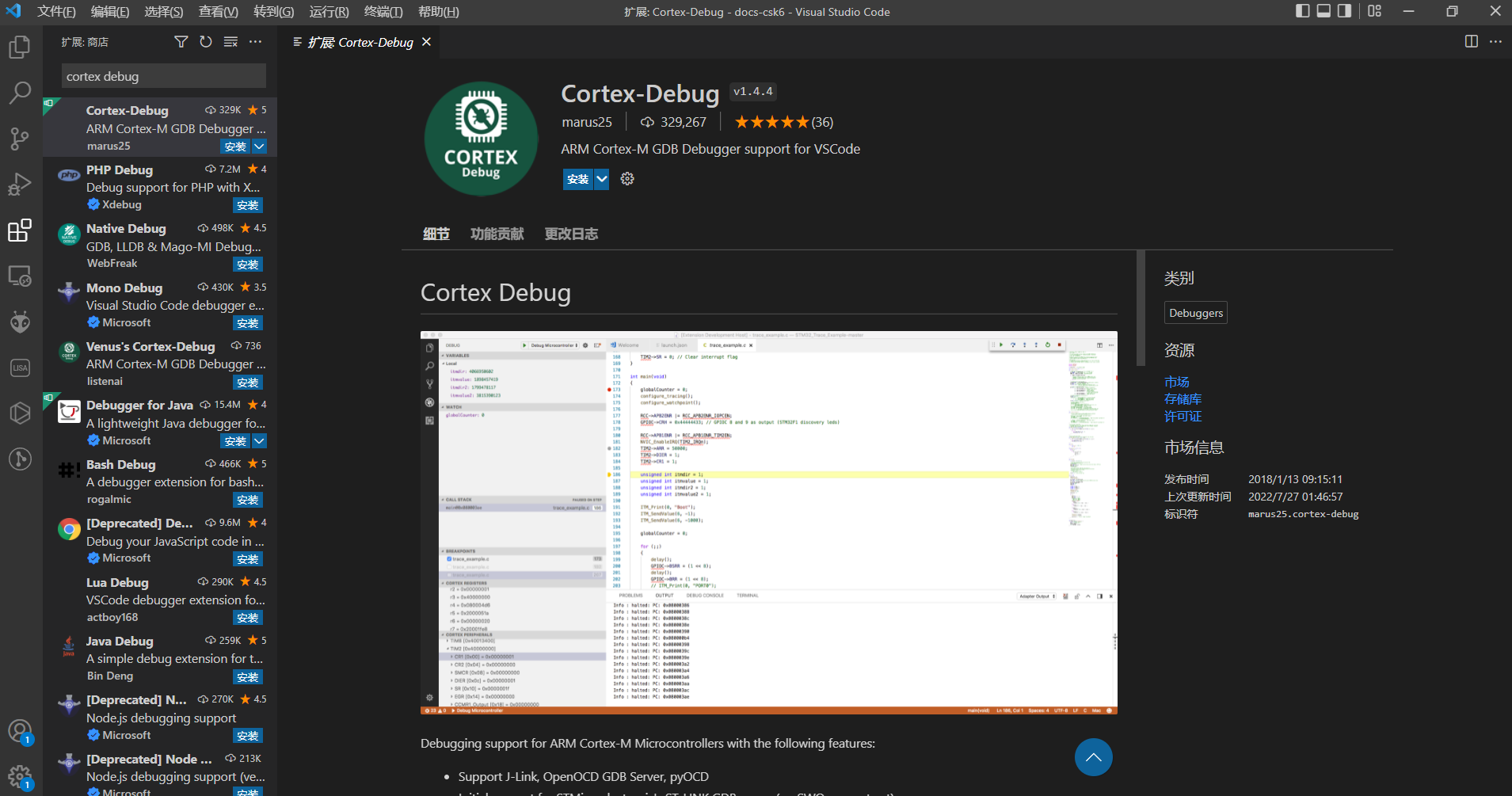
¶ VSCode 安装 Cortex-Debug 调试插件
在 VSCode 应用商店中搜索 Cortex-Debug 扩展插件,并完成安装,如下图所示:
¶ 基于已有项目的完成 debug 环境配置
步骤一: 在已有项目目录下使用以下命令完成编译。
lisa zep build -b csk6011a_nano
步骤二: 在已有项目目录下使用生成 debug 配置文件 launch.json 。
lisa zep ide
步骤三: 关闭所有已经打开的 VSCode 窗口,重新运行 VSCode 并打开刚才的项目文件夹。可以在路径 .vscode/ 目录下看到名为 launch.json 的 debug 调试文件。
¶ 创建新项目并完成 debug 环境配置
步骤一: 选择一个目录用于存放我们即将创建的项目,终端中进入该目录执行以下命令,创建 hello_world 项目。
lisa zep create
步骤二: 在项目目录下使用以下命令完成编译。
lisa zep build -b csk6011a_nano
步骤三: 在 VSCode 中打开刚刚创建的 hello_world 项目,可以在路径 .vscode/ 目录下看到名为 launch.json 的 debug 调试文件。
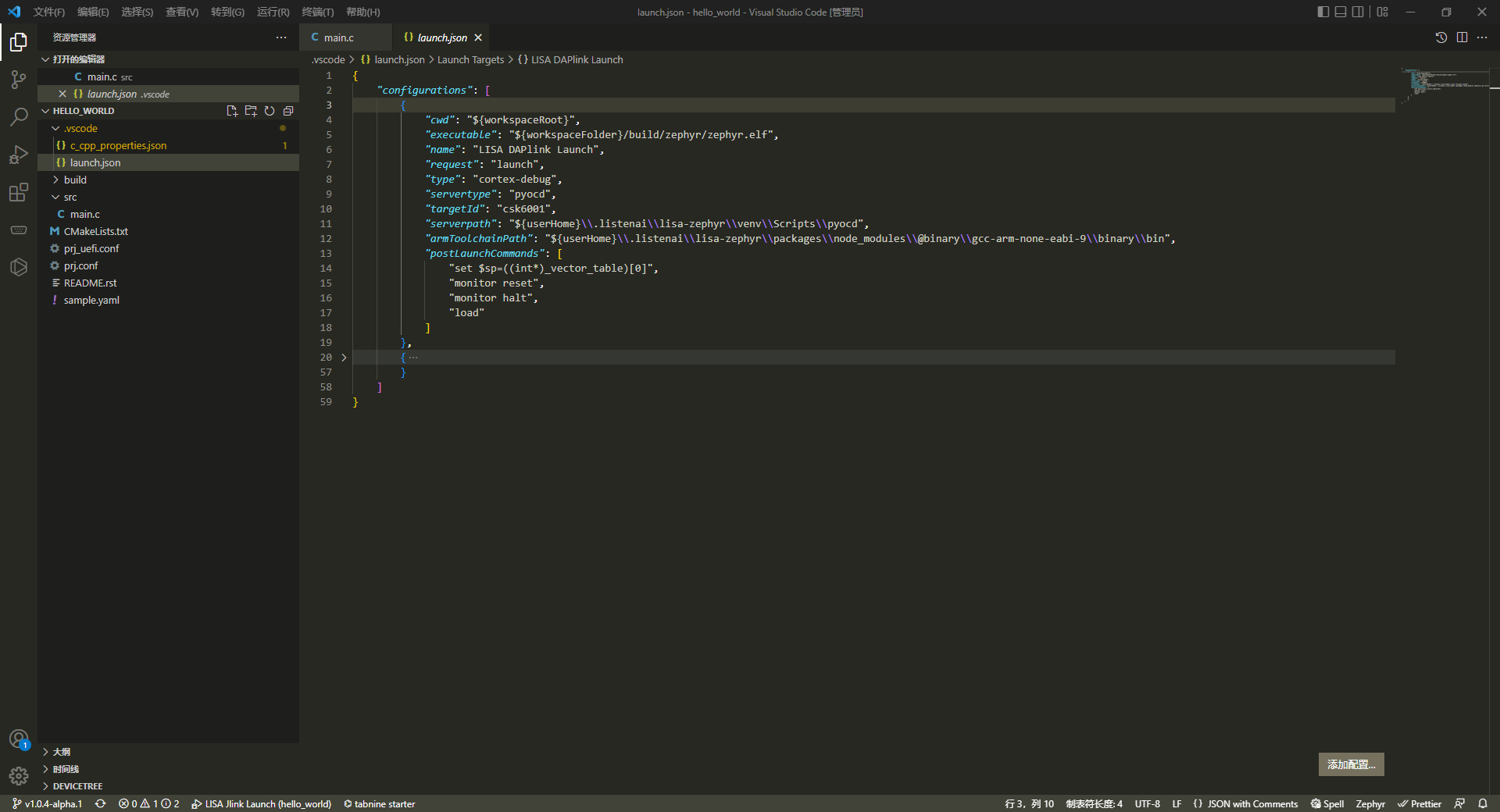
¶ 配置文件变量说明
executable: debug 应用项目的 zephyr.elf 文件路径,本示例为hello_world 项目的 zephyr.elf 路径。
serverpath: lisa 安装时带入的 pyocd 执行文件路径。
armToolchainPath: lisa 安装时带入编译链的路径。
TIP
.vscode 下放置的是各种配置文件,如:task.json 文件、launch.json 文件等,如遇配置文件不生效的情况,可关闭所有已打开VSCode之后重新运行。
¶ 对应用项目进行 debug 调试
¶ 步骤一:基于 hello_world 应用代码增加简单的代码逻辑
void main(void)
{
printk("Hello World! %s\n", CONFIG_BOARD);
/*增加一个while循环计数*/
int count = 0;
while (1) {
k_msleep(1000);
count++;
printk("count = %d", count);
}
}
¶ 步骤二:编译和烧录
- 编译
在 app 根目录下通过以下指令完成编译:
lisa zep build -b csk6011a_nano
- 烧录
指定 DAPLink + pyocd 作为烧录方式始烧录固件:
lisa zep flash --runner pyocd
TIP
待调试的应用程序需要完成编译并烧录到开发板后才能进行调试。
¶ 步骤三:断点调试
¶ 增加断点
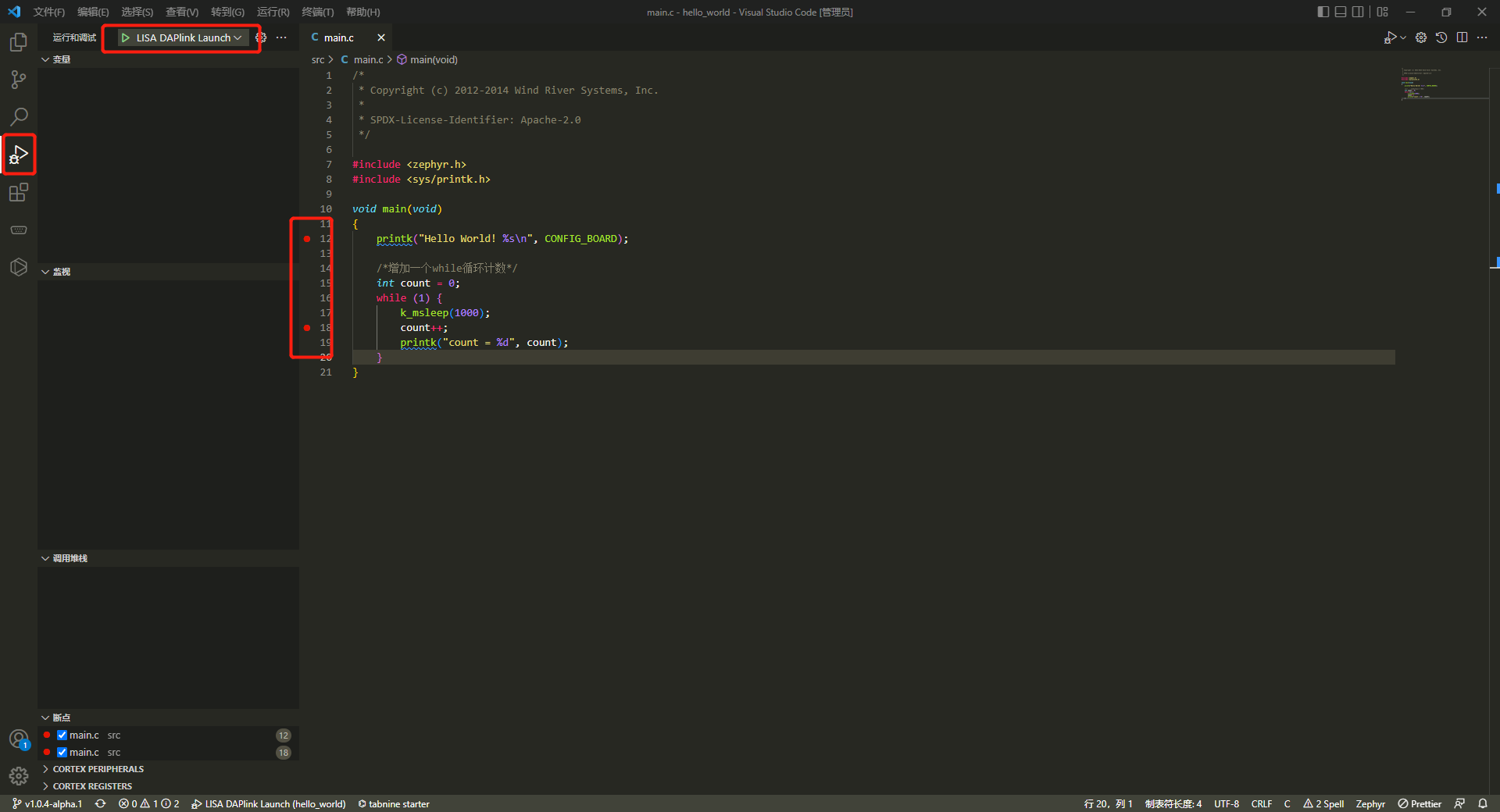
在 main 函数的第 12 行和第 18 行左侧单击鼠标左键增加两个断点,点击 VSCode 侧边栏的运行和调试按钮进入调试模式并选择LISA DAPlink Launch调试任务,如下图示:
¶ 开始调试
增加断点后点击运行调试按钮 (F5) 开始运行,变量值及监控变量可以在运行调试过程中显示,如下图示:

从上图可看到,当开始F5运行调试后,程序会停在第一个断点,此时 F5 继续执行后程序输出Hello world! 并调到第二个断点等待继续,此后每按一次 F5 继续执行则 while 循环中 count 自增并循环输出日志等待继续执行,同时在侧边栏可以看到 count 在调试过程中值的变化。
¶ 调试操作按钮
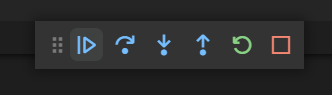
¶ 常用调试快捷键
| 按键 | 功能 |
|---|---|
| F5 | 继续(执行到下一个断点) |
| F10 | 单步调过 |
| F11 | 单步调试 |
| Shift + F11 | 单步跳出 |
| Ctrl + Shift +F5 | 重启 |
| Shift + F5 | 停止 |